 “愛車”を使い、すべての人が、安全、スムース、自由に移動できる社会をつくる
“愛車”を使い、すべての人が、安全、スムース、自由に移動できる社会をつくる
トヨタ自動車株式会社 制御システム先行開発部
第2自動運転技術開発室のメンバーたち。前列中央が主任の菅岩泰亮氏。
「いいデータがとれたらすぐ集まってディスカッション。
フットワークの軽さは、大学の研究室よりも上だと思います」
1980年代から自動運転開発を開始
トヨタ自動車制御システム先行開発部は、主に先進安全・自動運転システムの研究・先行開発を行う。約300人の部員は技術員と技能員が150人ずつ。彼らが4つの室に分かれ、それぞれ制御システムの基盤技術、先進安全システム、自動車専用道向け自動運転、将来自動運転研究・先行開発を担当し、試験課が種々の実験・評価を行うという布陣だ。開発に関しては、日本、欧州、北米と世界3拠点で行っている。
- すべての人に移動の自由を提供する
- ドライバーが運転したいときに運転を楽しめない車はつくらない
- 運転したくないとき、できないときは安心して車に任せることができる
- Mobility Teammate Conceptのもと、人と車が協調する自動運転をつくる
自動走行においては運転をシステムが実施することで、ドライバーの疲労を軽減、長時間走行時の安全性が向上する。またドライバーが運転を楽しみながらそれをシステムが見守るというリスク回避支援も行う。単なる自動運転ではない、ドライバー運転時にも応用が効くシステムを志向しているのだ。
部長の鯉渕氏は言う。
「これから先、車はどんどん知能化し、人に貢献できるものになる、自動運転技術はそのためのベースとなるものです」
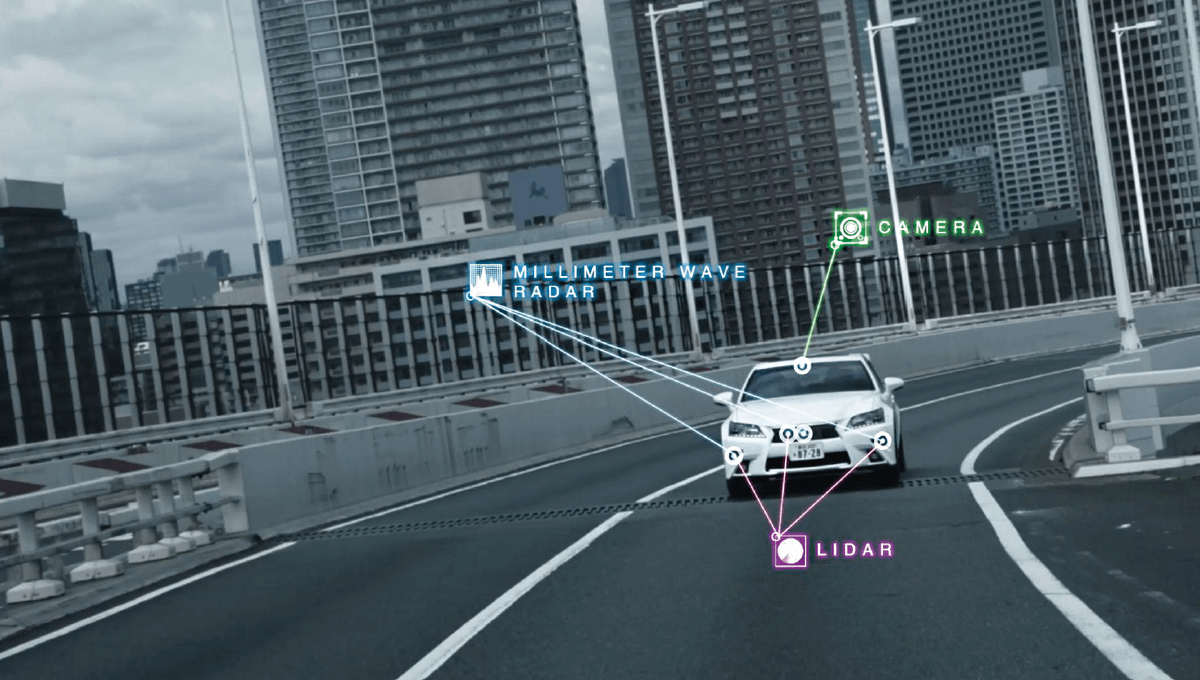
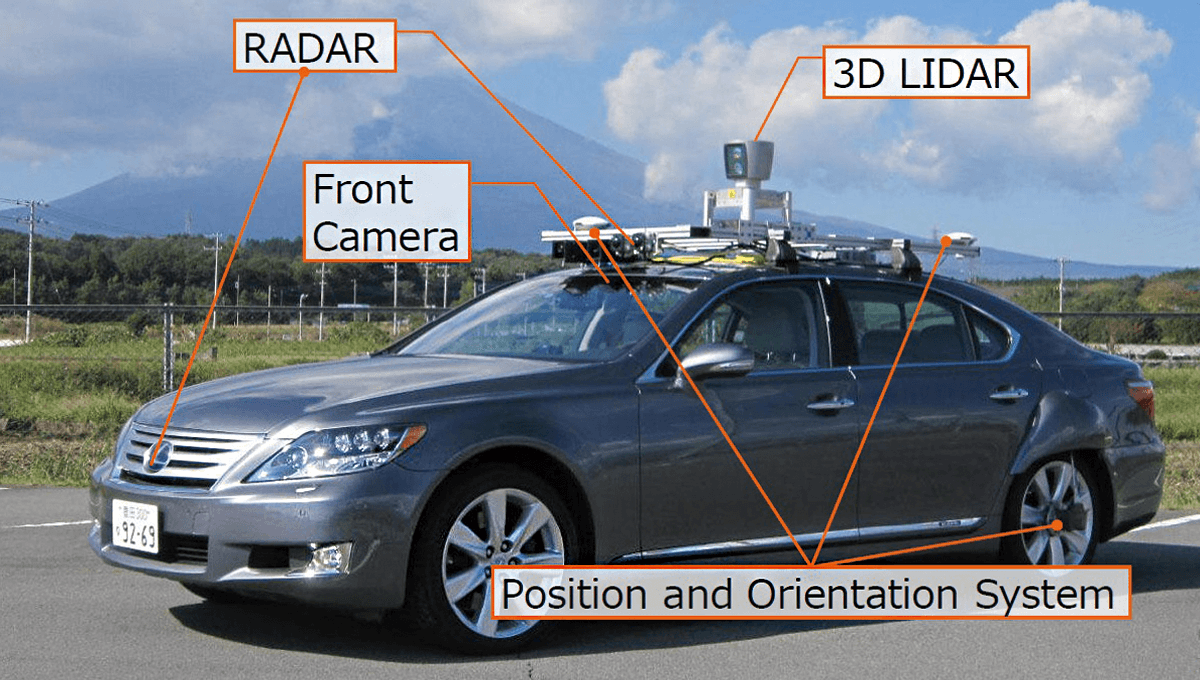
同社の自動運転技術は1980年代から始まっている。「前を走る車のテールランプを認識して追尾する」技術などが端緒だが、「今となっては特殊な技術ではない」と鯉渕氏。近年、3つの技術革新が起きた。センサー性能が向上し、外界の状態や自車位置を正確に測れるようになったことで自動運転用3D地図の自動作成が可能に。ハードウェア処理能力も飛躍的に向上。ソフトウェア面では自動運転基本アルゴリズムが確立され機械学習の精度も高まった。
鯉渕氏は「目標実現に向けて必要なことは、運転知能の実現と、人と機械の協調、今までとは違う車両技術、新たな社会的コンセンサス」と整理したうえで「自動運転は技術的に幅が広く、自社のコア技術と外部と連携して開発する技術を見極める必要がある」と指摘する。自動車メーカーのみならず電機メーカー、IT企業などが開発にしのぎを削る自動運転技術だが、そのうち世界最大手の自動車メーカーである”トヨタ”の強みはどこにあるのか。
「人と機械(車)を協調して走らせること。運転のことをよく知っていますし、先進安全、車の制御システムにおいても蓄積があります。一方で、未来に向け、さらに固めなくてはいけないのは、伝統的な自動車技術とは違う、運転知能の部分。これから我々の仲間になってくれる方にはコンピュータサイエンスやAI、センサー技術などの領域を期待します」(鯉渕氏)
新領域を切り開く自律的研究者を求む
制御システム先行開発部内の第2自動運転技術開発室に所属し、主任を務める菅岩泰亮氏は、ロボット工学の博士号を持ち、現在はセンサーによる周辺環境認識技術の開発に従事している。室内はセンサー技術の開発ほか、ドライバーと自動運転システムのインタラクション、自動車の制御技術などに担当が分かれるという。
「当社で働く面白さは、車のプロがすぐそばにいるということです。自分が考えた新しいアイデアをすぐに車に反映、実験できる環境は大学の研究室にはないもの。一方、近い将来に製品化するというリアルな目標があるので、プレッシャーはありますね。しかし、今、様々な業界が注目するトレンドの技術ということもあり、会社は最大限のバックアップをしてくれています」(菅岩氏)
最後に、同社で活躍できる研究者像を、鯉渕氏に聞いた。「安全で自由なモビリティの発展や革新に強い思いを持ち、テーマやロードマップを設定して積極的に動ける人。研究↓開発↓製品のプロセスを粘り強くやり遂げる意思のある人。チームワークに柔軟に対応でき、明るく活発なコミュニケーションができる人。そのうえで、やる気旺盛、謙虚、質実剛健な人がいい。贅沢な要望ですが、そんな研究者を求めています」(鯉渕氏)

鯉渕 健
こいぶち・けん/1993年4月、東京大学工学系研究科機械工学専攻修了後、トヨタ自動車に入社。ブレーキ制御を用いた車両安定化制御、ステア制御などを統合した車両運動統合制御の開発に従事。2006年からはエンジン、トランスミッションを統合制御する駆動力デマンド制御、アイドリングストップや充電制御等の省燃費制御システムなどの開発を担当。14年より自動運転技術開発を担当している。
創立/1937年8月
代表者/代表取締役社長 豊田章男
従業員数/連結34万4109人(2015年3月末現在)
所在地/愛知県豊田市トヨタ町1
コメント